자동차 전자제어 장치(ECU) 개발을 하다 보면
“이거 ISO 26262 맞춰야 합니다”라는 말을 자주 듣게 됩니다.
하지만 막상 표준 문서를 펼쳐 보면 용어도 복잡하고,
어디서부터 어떻게 적용해야 할지 감이 잘 안 오죠.
이 글에서는 개발자 입장에서 ISO 26262를 어떻게 이해하고 적용하면 되는지를
가능한 쉬운 언어로 정리해 보겠습니다.
(예시는 카메라 ECU / TDA4VM 같은 SoC 기반 시스템을 기준으로 설명합니다.)

1. ISO 26262는 뭘 하자는 규격인가?
한 줄로 요약하면:
“자동차에서 사용하는 전기전자(E/E) 시스템이 고장 나더라도
사람을 다치게 하지 않도록 개발해라.”
특징을 몇 가지로 정리하면:
- 대상: 양산 차량에 들어가는 전기/전자 시스템(ECU, 센서, 액추에이터 등)
- 관점: “기능 안전(Functional Safety)” – 기능이 잘못 동작해서 위험을 만들지 않게
- 방법: 기획부터 폐차 시점까지 전체 라이프사이클에 걸쳐
위험 분석 → 요구사항 → 설계 → 구현 → 검증을 체계적으로 수행
즉, “버그 줄입시다” 정도가 아니라,
“사고(인명 피해)를 줄이기 위한 체계적인 개발 프로세스”에 대한 표준입니다.
2. 세 가지 핵심 키워드: HARA, ASIL, Safety Goal
2.1 HARA (Hazard Analysis and Risk Assessment)
먼저 “어떤 상황에서 어떤 위험이 생길 수 있는지”를 분석합니다.
예: 전방 카메라 ECU라면
- 고속 주행 중 카메라 영상이 멈춘다
- 차선 인식이 틀어져서 차량이 잘못 조향된다
- 야간/우천 시 영상이 너무 어둡게 출력되어 장애물을 인지 못한다
각 위험에 대해 세 가지를 평가합니다.
- S (Severity): 사고가 나면 얼마나 심각한가 (사망, 중상, 경상…)
- E (Exposure): 그런 상황이 얼마나 자주 발생하는가
(고속도로 주행 vs 특수 상황 등) - C (Controllability): 운전자가 그 상황을 스스로 회피할 수 있는가
이 조합으로 위험도를 계산하고, 그 결과로 ASIL 등급을 정합니다.
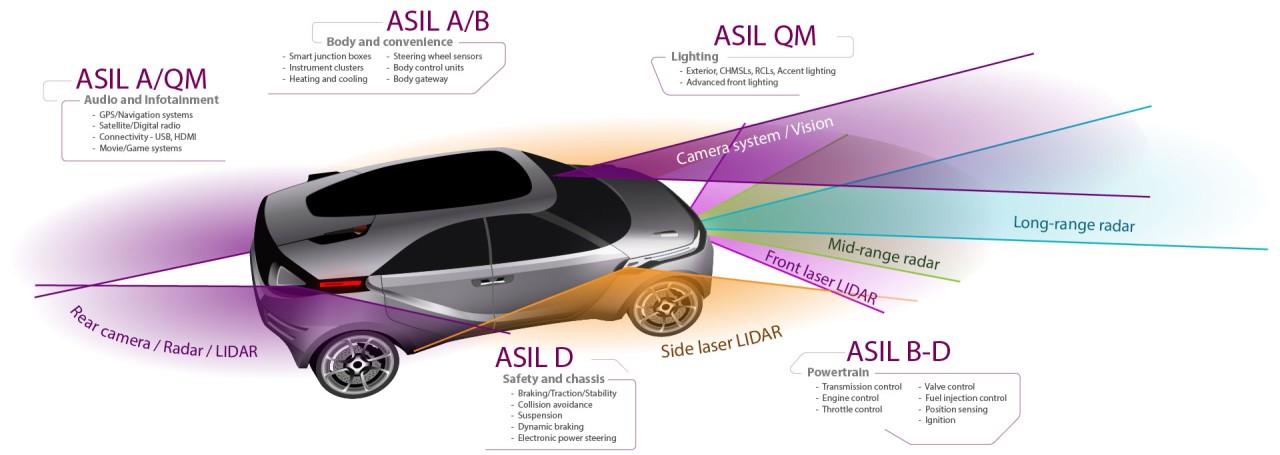
2.2 ASIL (Automotive Safety Integrity Level)
ASIL은 A ~ D 네 단계 + QM 이 있습니다.
- ASIL D: 가장 엄격, 생명에 직결될 수 있는 시스템
- ASIL C/B: ADAS, 제동 보조 등 꽤 중요한 기능
- ASIL A: 비교적 낮은 위험이지만 여전히 안전 요구가 있는 기능
- QM (Quality Management): 일반 품질 관리 수준이면 충분

쉽게 말해:
ASIL이 높을수록
“더 많은 분석·문서·테스트·이중화”가 필요합니다.
예를 들어,
- 주차용 서라운드뷰 시스템 → 보통 QM ~ ASIL B
- 주행 중 차선 유지 보조용 카메라 → ASIL B ~ C 정도를 목표로 잡는 경우가 많습니다.
2.3 Safety Goal (최상위 안전 목표)
HARA와 ASIL 분석을 통해,
“이 시스템이 반드시 지켜야 하는 최상위 안전 목표”를 정리합니다.
예를 들어:
- “카메라 영상이 신뢰할 수 없는 상태가 되었을 때,
운전자에게 명확한 경고를 제공해 오판을 막는다.” - “ADAS 기능에 잘못된 카메라 데이터를 전달하지 않는다.”
이 Safety Goal이 이후 단계에서
시스템 요구사항 → HW 요구사항 → SW 요구사항으로 쪼개져 내려갑니다.
3. ISO 26262 개발 V-모델: 시스템 → HW → SW
ISO 26262는 전형적인 V-모델 구조를 사용합니다.
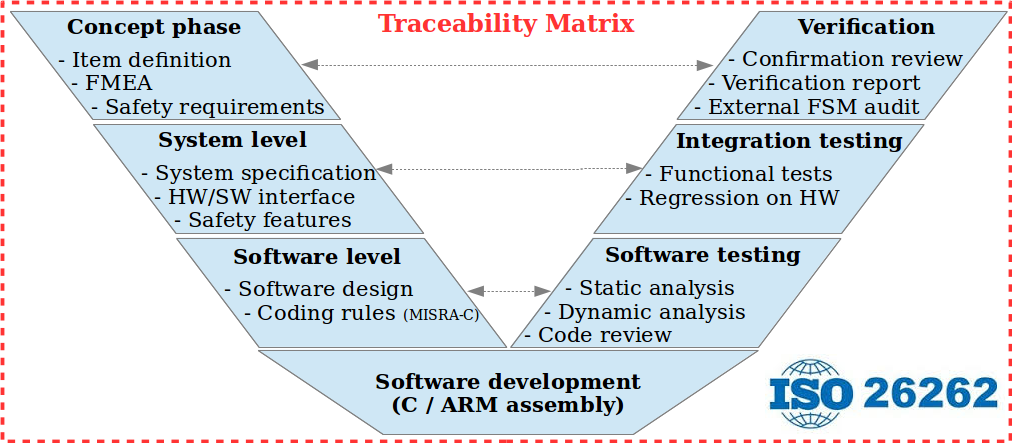
3.1 시스템 레벨
- 아이템 정의(ECU가 하는 일, 인터페이스, 운전 시나리오 정리)
- HARA/ASIL 분석, Safety Goal 정의
- 시스템 아키텍처 설계
- 예: TDA4VM SoC + PMIC + 카메라 센서 + 통신(CAN/Ethernet) + 디스플레이
- 시스템 안전 요구사항 정의
- 예:
- “카메라 고장 발생 시 500ms 이내에 운전자에게 경고 표시”
- “센서 또는 링크 고장 시 ADAS ECU에 DTC 전송”
- 예:
3.2 하드웨어 레벨
하드웨어 입장에서 “고장이 나도 안전하게” 만들기 위한 활동입니다.
- 고장 모드 분석(FMEA, FMEDA)
- 어떤 부품이 어떻게 고장 날 수 있는지, 그때 무슨 일이 생기는지 정리
- 진단 메커니즘(모니터 회로, 이중화, self-test 등) 설계
- 안전 관련 HW 메커니즘
- 이중 전원, safety PMIC, watchdog, lockstep CPU, ECC 메모리 등
- 결과적으로 ASIL 목표에 맞는 고장률·진단 커버리지를 맞춰야 합니다.
TDA4VM 같은 SoC는 이미 기능 안전을 고려한 하드웨어 블록(ECC, lockstep, safety MCU 등)을 제공하므로,
이걸 어떻게 활성화해서 ECU 설계에 녹였는지를 설명할 수 있어야 합니다.
3.3 소프트웨어 레벨
개발자에게 가장 현실적으로 다가오는 부분입니다.
- SW 안전 요구사항 정의
- 시스템/하드웨어에서 내려온 안전 요구사항을
소프트웨어 관점에서 구현 가능한 요구사항으로 변환합니다.
- “I2C 통신 오류가 연속 N회 발생하면 카메라 스트리밍을 중단하고 경고 표시”
- “프레임 시퀀스가 끊기면 오류 카운트를 증가시키고 DTC를 기록”
- “주기적으로 watchdog을 kick하고, 정해진 시간 안에 동작하지 않으면 시스템 리셋”
- 시스템/하드웨어에서 내려온 안전 요구사항을
- 안전 메커니즘 구현
- 입력값 검증, boundary check
- 타임아웃, 재시도, 예외 처리
- self-test, sanity check (예: 프레임 타임스탬프/해상도/포맷 확인)
- fail-safe 모드 정의
- 카메라 영상이 이상하면 → 화면 블랭크 + 경고 문구
- ADAS 입력으로는 더 이상 사용하지 않게 플래그 설정
- 코딩 규칙 / 정적 분석
- C/C++: MISRA-C, CERT-C 등 코딩 규칙 적용
- 정적 분석 도구 사용(누수, 오버플로우, NULL 포인터, 위험 패턴 탐지)
- 코드 리뷰에서 안전 요구사항 만족 여부 확인
- 테스트
- 단위(Unit) 테스트: 함수/모듈 단위
- 통합(Integration) 테스트: 카메라 드라이버 + ISP + 어플리케이션 레벨 결합
- 시스템(System) 테스트: 실제 보드, 실제 센서, 실제 전원/온도/진동 환경에서 검증
- 필요 시 HIL/SIL(시뮬레이터) 활용
ISO 26262는 단순히 “테스트 해라”가 아니라,
어떤 수준의 커버리지를 목표로 할지, 어떤 방법으로 안전 요구사항을 검증할지까지 계획하고 기록하라고 요구합니다.
4. ISO 26262에서 자주 나오는 산출물(문서)들
현실적으로 가장 부담스러운 부분이 바로 “문서 작업”입니다.
대표적으로 이런 것들이 있습니다.
- Item Definition 문서
- HARA 보고서 (위험 분석 결과)
- Safety Goal / Safety Requirement 리스트
- 시스템/소프트웨어 아키텍처 문서
- FMEA/FMEDA/FTA 결과
- 테스트 계획 / 테스트 케이스 / 테스트 리포트
- 코드 리뷰 기록, 정적 분석 리포트
- 변경 관리/이슈 관리 내역
- 최종 Safety Case (우리가 ASIL X를 만족한다는 근거 모음집)
모두를 완벽하게 갖추는 게 이상적이지만,
프리랜서나 초기 프로젝트 단계에서는 가볍게라도 최소 세 가지는 꼭 남기는 게 좋습니다.
- HARA + Safety Goal 요약
- 안전 요구사항 목록(시스템 + SW)
- 테스트 케이스 및 결과 리포트
이 세 가지가 있으면, 나중에 OEM/1차 협력사와 협업할 때도
“안전 관점에서 어느 정도 생각하고 설계했다”는 걸 보여 줄 수 있습니다.
5. 카메라 ECU 예제로 보는 ISO 26262 적용 포인트

TDA4VM + 카메라 센서 기반 ECU를 예로 들면,
ISO 26262 관점에서 신경 쓸 만한 체크 포인트를 정리해 보면:
- 기능 정의 & 위험 분석
- 어떤 주행 상황에서 카메라가 어떤 역할을 하는지
- 고장 시 어떤 위험으로 이어지는지 (주차 vs 고속 주행 등)
- 고장 탐지 & Fail-safe 전략
- I2C/CSI 오류, 센서 리셋 실패, 프레임 드롭 등을 어떻게 감지할지
- 감지 후:
- 운전자 경고 표시
- ADAS 기능 일시 중단
- 로그/DTC 저장
- 하드웨어 안전 기능 활용
- TDA4VM의 ECC, lockstep, watchdog, PMIC 모니터 등을 어떤 경로로 연결할지
- 전원/온도 이상 시 어떤 방식으로 시스템을 보호할지
- 소프트웨어 품질 활동
- 코딩 규칙 적용, 코드 리뷰, 정적 분석
- 단위/통합/시스템 테스트, 장시간 런닝 테스트
- Git 기반 변경 이력 관리, 이슈 트래킹
- 문서화
- 최소한 HARA 요약 + 안전 요구사항 + 테스트 리포트는 프로젝트 내 docs/에 정리
- 후속 프로젝트(다른 센서, 다른 ECU)에서 그대로 재사용 가능하게 구조화
6. 프리랜서/개발자 입장에서 현실적으로 어떻게 접근할까?
ISO 26262를 100% 충족하려면
조직 차원의 프로세스(ASPICE, 품질 시스템 등)가 필요해서
개인 단위로는 사실상 어렵습니다.
그래도 다음 네 가지만 지켜도 “안전 관점에서 생각하고 있다”는 걸 충분히 보여 줄 수 있습니다.
- 위험 시나리오 + Safety Goal 간단 정리
- SW/HW 안전 요구사항 목록 작성
- 안전 메커니즘 구현 (진단 + fail-safe)
- 테스트/리뷰 기록을 남기는 습관
나중에 OEM나 1차 협력사와 협업할 때,
이 자료들을 기반으로 “더 공식적인 ISO 26262 프로세스”로 확장해 나갈 수 있습니다.
마치며
ISO 26262는 단순한 “규제”가 아니라,
“자동차 전자 시스템을 안전하게 만들기 위한 체크리스트 + 개발 방법론”에 가깝습니다.
처음에는 용어도 많고 문서도 많아서 부담스럽지만,
- HARA로 위험을 정리하고,
- ASIL에 맞는 수준의 안전 메커니즘과 테스트를 설계하고,
- 그 과정을 문서로 남긴다.
이 세 줄만 머릿속에 두고 프로젝트를 진행해 보면
생각보다 자연스럽게 ISO 26262 방식에 익숙해질 수 있습니다.
궁금한 부분이나 더 보고 싶은 내용이 있다면 댓글로 남겨 주세요.
'HW SW 개발' 카테고리의 다른 글
| 💻🔧리눅스 크로스 컴파일이란? (초보도 이해하는 정리) (0) | 2025.12.14 |
|---|---|
| 💻🔧윈도우11에서 VirtualBox 설치하다가 삽질한 기록: VC++ x86/x64 오류 해결기 (0) | 2025.12.14 |
| UWB·ToF·BLE를 활용한 실내 위치 측정 시스템 설계 정리(임베디드 펌웨어 포트폴리오) (0) | 2025.12.11 |
| 📌 [포트폴리오] 임베디드 리눅스 포팅과 실전 프로젝트 경험 정리 (0) | 2025.12.11 |
| 📡 MQTT 연재 2회 : MQTT 구조와 동작 방식 제대로 이해하기 (0) | 2025.12.07 |


